

Calibración del centro óptico ojo de pez
I. Introducción
La lente ojo de pez es una lente gran angular que captura una imagen deformada con apariencia distorsionada. Los usuarios también pueden aplanar o corregir la deformación de la imagen en una vista panorámica o rectilínea. Los modos de visualización disponibles con el chip incluyen:
“O” para vista “Original”: esta es la imagen original y deformada capturada por la cámara.
“P” para vista “Panorámica”: esta es la vista panorámica básica que se ha corregido.
"R" para vista "Regional" o "Rectilínea":
Esta vista permite una vista única, aproximadamente igual a un cuadrante de la imagen general, que puede hacer uso de operaciones de panorámica, inclinación o zoom mediante la función PTZ de la cámara.
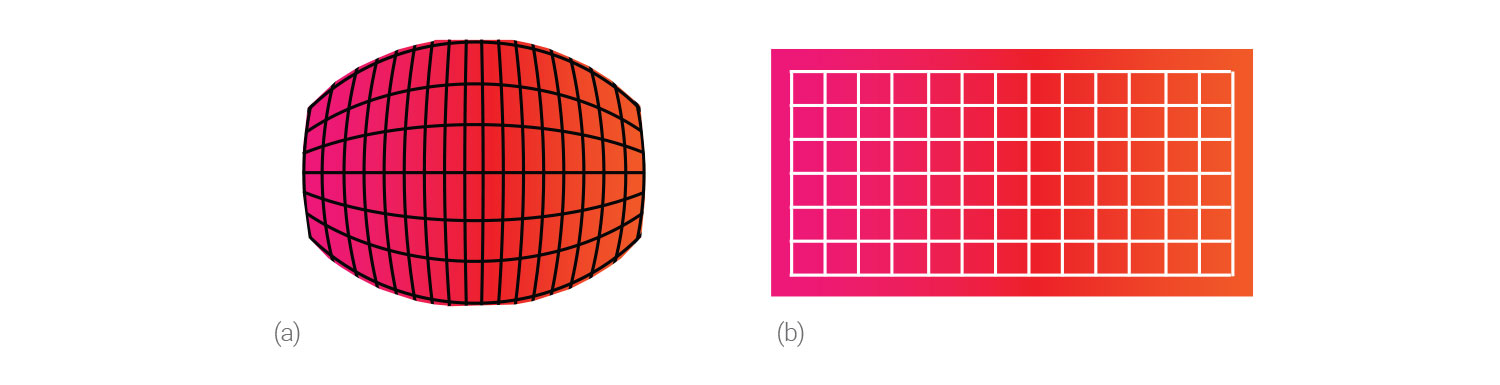
Por ejemplo, en la figura 1 se muestra un uso común de corrección de deformación de 10, la imagen de 10 se deforma a la imagen de 1P. Es de vital importancia que el chip obtenga los parámetros ópticos adecuados para la corrección de la deformación.
Hay tres parámetros ópticos en la configuración del chip: RADIUS, HSHIFT y VSHIFT. Podemos derivar estos parámetros de la posición del círculo que se obtiene mediante el esquema propuesto.
II - El esquema propuesto
Con base en las situaciones mencionadas anteriormente, para buscar la posición del círculo, hay varias etapas que se describen a continuación:
A. Genere una imagen que tenga un límite claro en el modo 1O
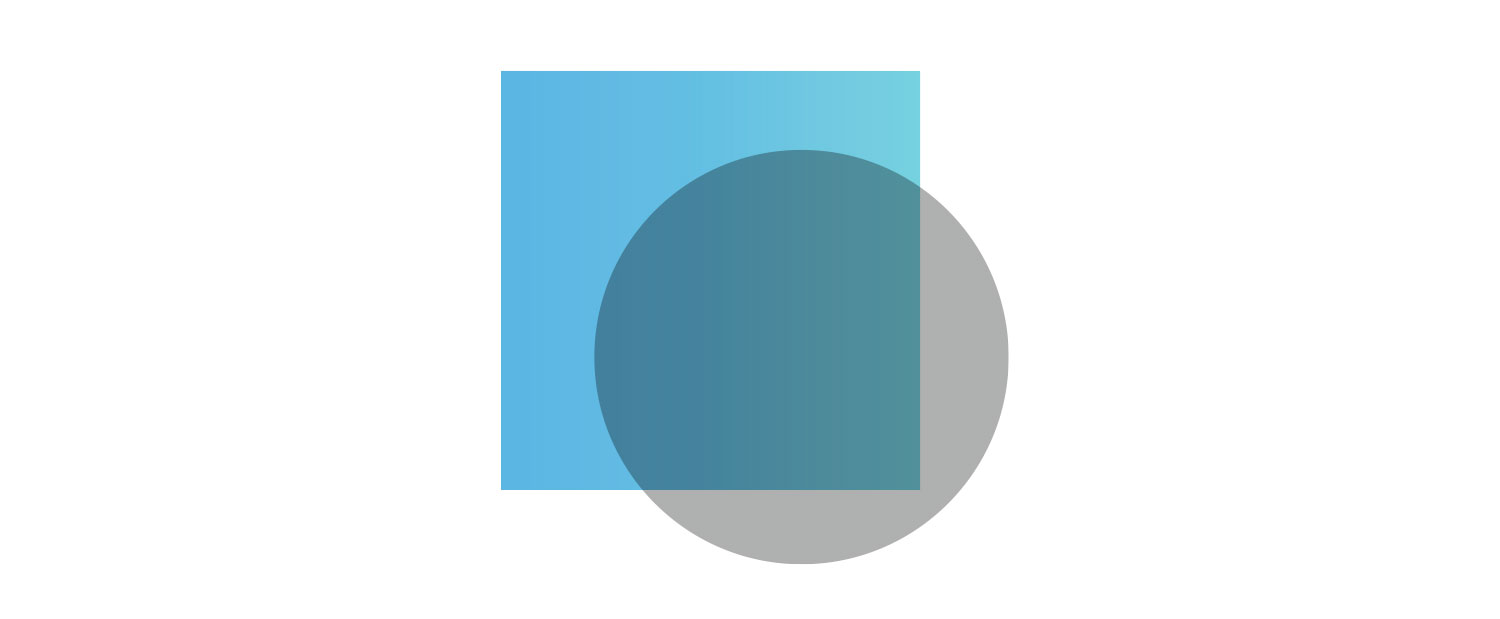
Para generar una imagen que tenga un límite claro en el modo 1O, podemos cubrir la lente de la cámara con una máscara semiopaca. Cabe señalar que debemos proporcionar suficiente fuente de luz en la parte superior de la máscara semiopaca. La figura 3 muestra una instalación simulada para esta etapa.
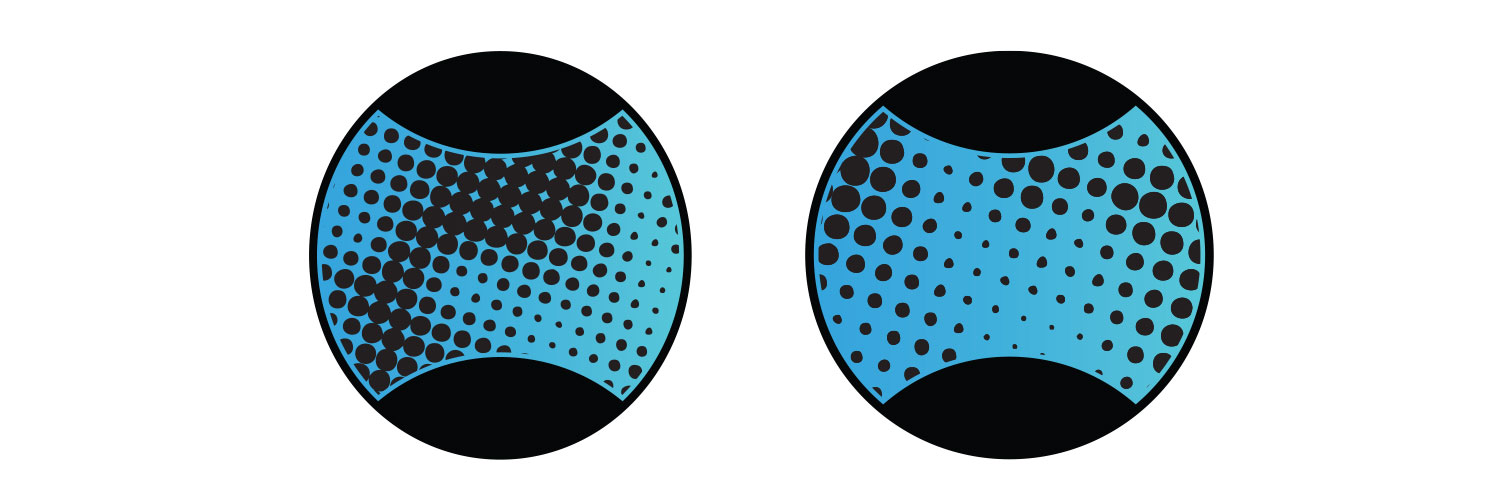
Como se puede ver en la Fig. 4, obtuvimos una imagen que tiene un límite claro en el modo 10. Con esta función, podemos seleccionar un umbral adecuado para detectar el límite del círculo.

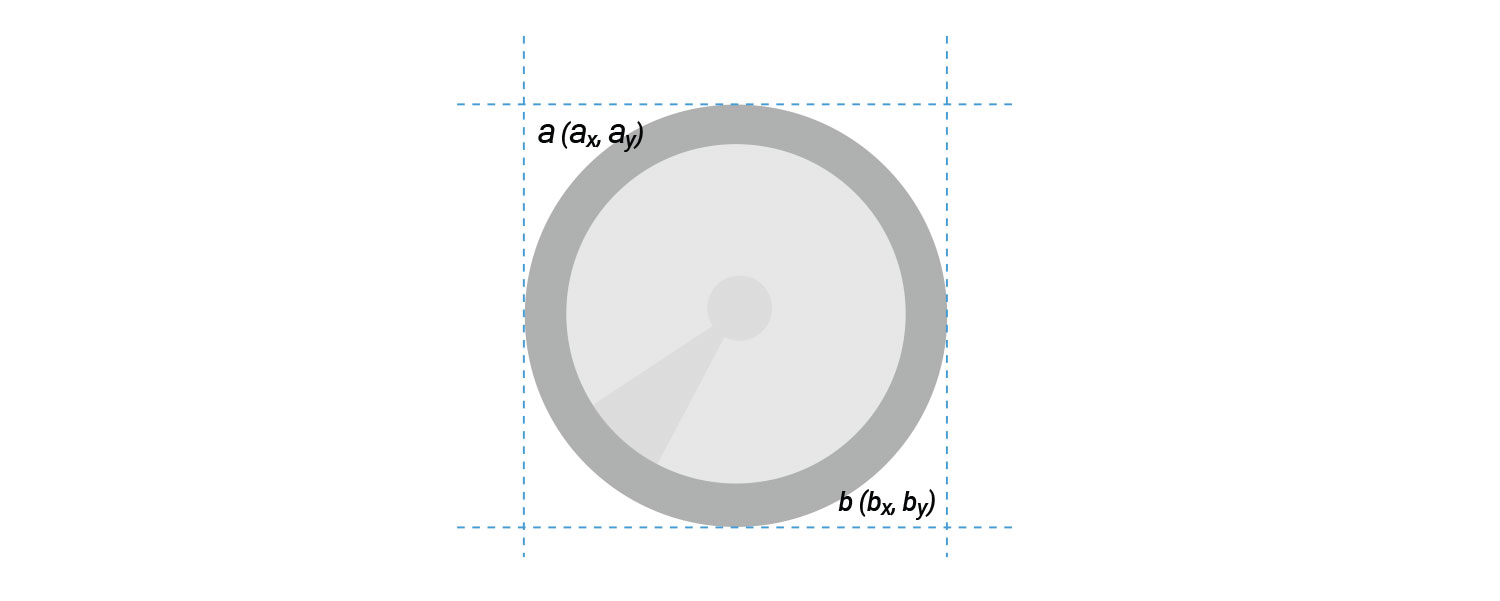
Como se puede ver en la figura 5, necesitamos obtener las coordenadas del punto ay del punto b para poder calcular el centro del círculo.
B. Suavizar la región objetivo
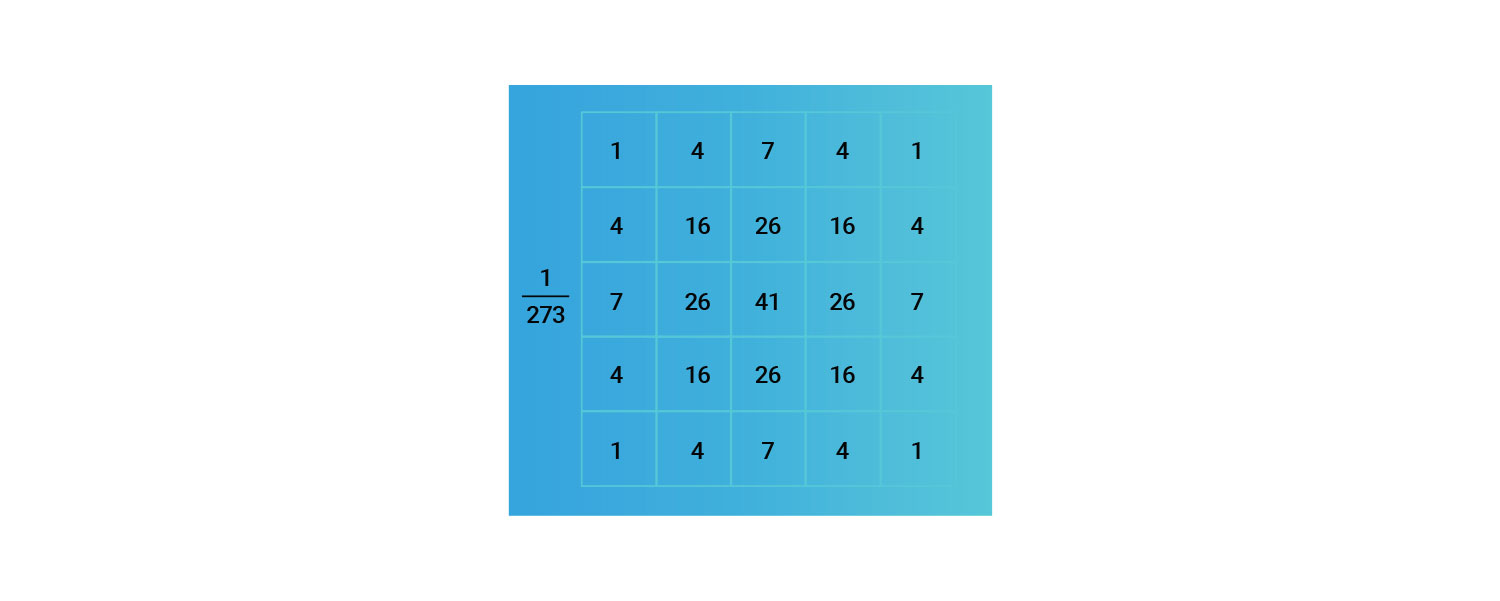
El operador de suavizado gaussiano [1] es un operador de convolución bidimensional que se utiliza para desenfocar imágenes y eliminar detalles y ruido. La figura 6 muestra un núcleo de convolución de valor entero adecuado que se aproxima a un gaussiano con una desviación estándar de la distribución = 1. Después de revelar la forma no adulterada del píxel, podemos mejorar aún más el efecto de procesamiento de la imagen y reducir los falsos positivos.
Como se puede ver en la figura 7, configuramos las regiones donde queremos buscar el punto límite. El proceso de suavizado solo se puede aplicar a estas regiones.
C. Buscar el punto límite
La resolución de la imagen es de 640 × 480, la distancia entre el punto del límite del círculo y el límite de la imagen es bastante diferente en situaciones horizontales y verticales. Podemos establecer una compensación adecuada para abordar este problema. Como se puede ver en la Fig. 8, obtenemos el valor de píxel por barrido raster. Si el valor de píxel actual es mayor que el valor de umbral seleccionado (es decir, más brillante que el umbral), la posición actual puede actuar como punto límite.

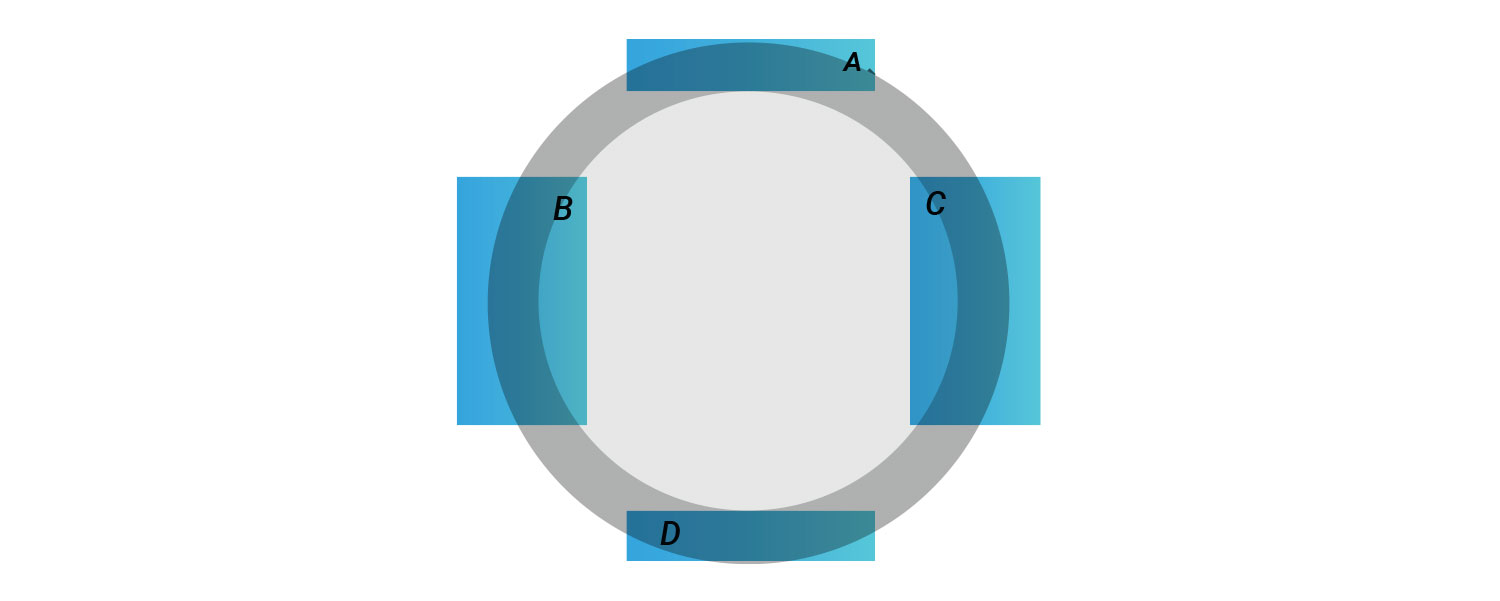
Las coordenadas del punto ay del punto b se pueden recuperar de las siguientes regiones:
Región A → ay
Región B → ax
Región C → bx
Región D → por
Una vez que obtenemos la posición del punto ay el punto b, se puede calcular el centro del círculo y el radio.
D. Escribir los parámetros en la memoria flash
Debido al requisito del parámetro de chip durante el proceso de arranque, necesitamos ejecutar este programa en el proceso de fabricación. Cuando los parámetros se obtienen de este programa, podemos escribir los parámetros en la memoria flash que se pueden preparar para un uso posterior (por ejemplo, el proceso inicial del chip y la interfaz de usuario web).
III - Resultados experimentales
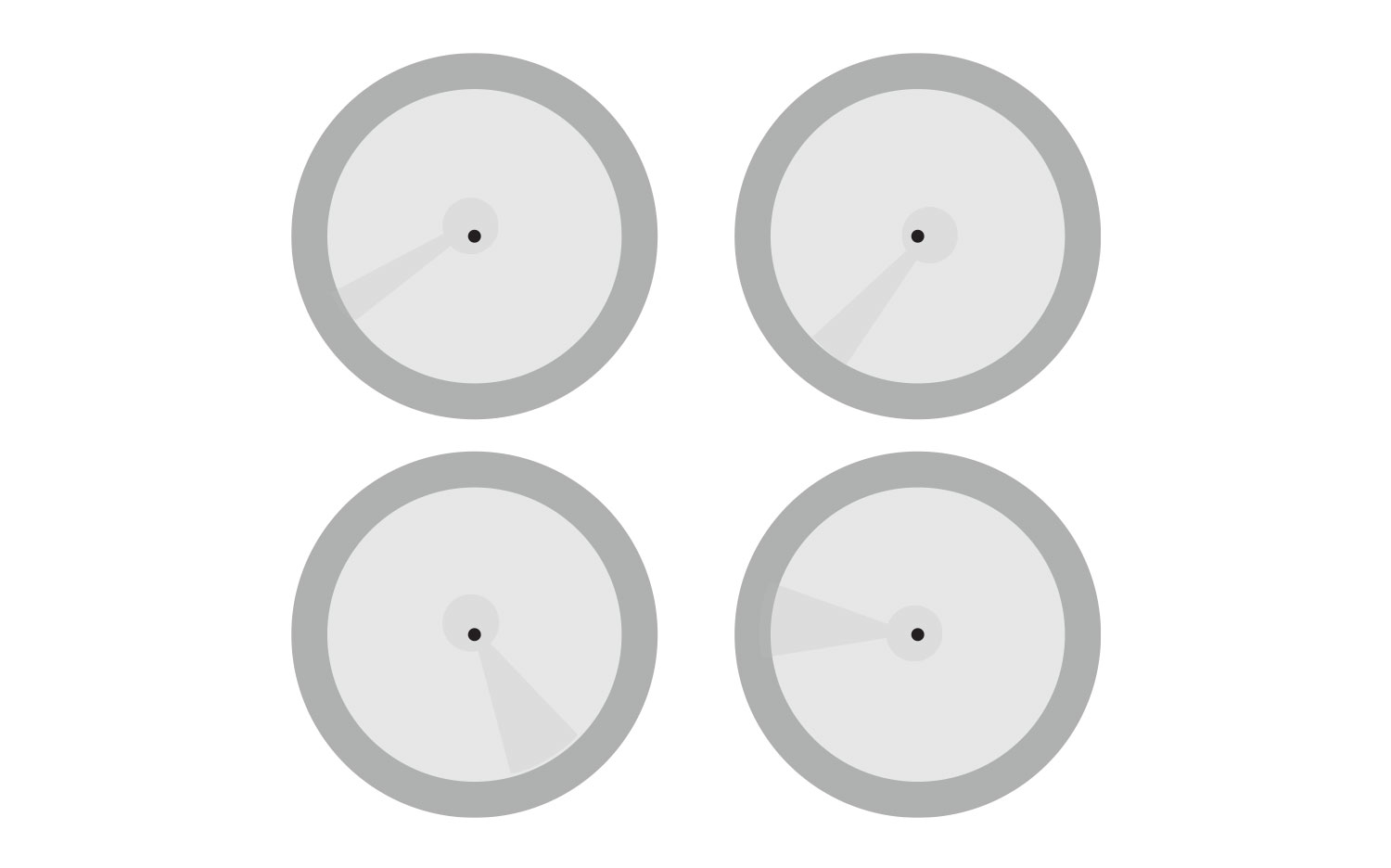
El esquema propuesto se ha implementado en la plataforma Linux. La figura 9 ilustra cuatro dispositivos diferentes; la circunferencia del círculo y el centro del círculo se muestran en color negro, respectivamente.
IV.conclusión
En este artículo proponemos un método para conocer el centro óptico y el radio de la esfera. Con base en los resultados experimentales, el centro óptico y el radio se pueden encontrar de manera efectiva mediante el esquema propuesto.
Referencias
1. RC Gonzalez y RE Woods, Digital Image Processing, 3ª ed., Prentice Hall, 2007.